Fallas y averías encontradas en el montaje de la embotelladora.
1. desorden en el cableado del montaje
2. Mala programación en el Plc
3. no teníamos los planos de conexión físicos
Como detectamos las fallas:
1. debido al desorden del cableado, a simple vista era difícil encontrar e identificar ciertos conductores (cables de alimentación, los cables del sensor) y también cuando la banda estaba activada, ciertos cables se enredaban con ella y activaban los sensores.
2. cuando conectamos los sistemas del Plc y la banda, nos dimos cuenta de que había u problema al ver que el Plc no activaban ninguna de sus salidas, en respuesta a las señales de entrada. Al comprobar de que todas las conexiones se encontraban bien y el programa era correcto, dedujimos que mas seguro era un error en la carga del programa: problemas de comunicación de módulos, etc...
3. a la hora de hacer el montaje y debido a no tener preste el plano tuvimos algunas dificultades, como cierta lentitud y un mayor desgaste a la hora de revisar y verificar el cableado.
martes, 29 de septiembre de 2009
jueves, 24 de septiembre de 2009
CIRCUITOS ELECTRICO NEWMATICOS
SISTEMA DE ESTAMPADO
Marco teórico
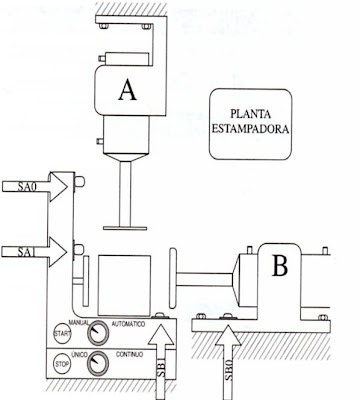
En una fábrica se requiere automatizar un proceso de estampado; para esto se decide utilizar dos válvulas monoestables y dos actuadores neumáticos de doble efecto. Donde el actuador B sujeta la pieza a estampar, el actuador A realiza el proceso de estampado y finalmente actuador B libera la pieza estampada.
POSIBLE SOLUCIÒN
Sistema realizado en el programa de simulacion FESTO FLUDISIM

EMPACADO DE ZAPATOS Y BOTAS
Marco teórico
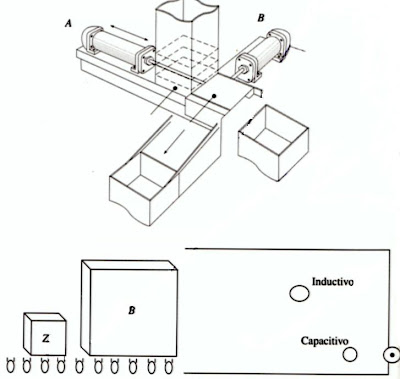
Un sistema de clasificación y empaque de productos de calzado es capaz de diferenciar entre zapatos y botas y ejecutar la primera operación de empaque de los mismos, según el plano de situación que se observa en la figura 1.
La clasificación del producto se hace de acuerdo con dos sensores electrónicos. Cuando a través del dispositivo de alimentación llega una caja de zapatos, deberá activarse un sensor óptico Zl. Si es caja de botas, deberán encenderse al mismo tiempo dos sensores, Zl y Bl, siendo este último de naturaleza inductiva. Para asegurar el buen posicionamiento de la caja en el dispositivo de alimentación, se cuenta con un detector de rodillo electromecánico en la base del mismo.
Después de eso, el cilindro A expulsará, con velocidad regulada, el producto hacia la zona de empaque, donde existe un cilindro B. Si la caja identificada fue de zapatos, el cilindro A recorrerá sólo la mitad de su carrera y regresará de manera inmediata a su posición original. La mitad de carrera de este cilindro A deberá ser detectada a través de un sensor capacitivo. Los desplazamientos de los cilindros se deben de realizar en el diagrama espacio-fase Si el producto identificado es de botas, el cilindro A deberá cumplir toda su carrera para vaciar la caja hacia un recipiente ubicado en el suelo. El cilindro regresará en forma inmediata a su posición de origen.
Las posiciones finales de ambos cilindros deberán detectarse me-diante rodillos electromecánicos. El sistema, además de funcionar en forma automática en todo su ciclo, no dependerá de ningún operador, sólo del sistema de alimentación.
POSIBLE SOLUCIÒN
Sistema realizado en el programa de simulacion FESTO FLUDISIM

EMPACADO DE CAJAS
Marco Teórico
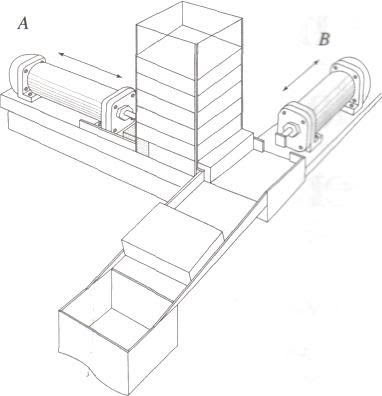
En la figura siguiente se observa un proceso neumático de empaque de piezas, cuya secuencia de operación es corno se explica a continuación:
De acuerdo con las necesidades específicas de la empresa, el arranque, paro y operación nominal de la máquina es de acuerdo con las siguientes especificaciones:
Arranque: Al principio de la jornada laboral se da por hecho que los cilindros se encuen tran en posición retraída. En caso contrario el operador deberá forzar al siste ma a que logre estas condiciones, empleando las conexiones de pilotaje de las válvulas de control. Así, el inicio de la secuencia se da mediante la activación de un botón pulsador o enclavado, al mismo tiempo que se garantizan posiciones de cada cilindro de doble efecto mediante rodillos 3/2 NC.
Paro: Cuando suceda un error, deberá existir un botón de paro de emergencia que detenga la máquina y la lleve al estado de reposo dadas por las condiciónes iniciales de operación.
Secuencia de trabajo: Una vez iniciada la secuencia, los cilindros harán una repetición de tres cicle y se detendrán, ya que en ese momento la caja de empaque quedará llena. Asi el operador procederá a retirar el empaque lleno y él se encargaría de reiniciar la secuencia de los cilindros mediante un botón.
POSIBLE SOLUCIÒN
Sistema realizado en el programa de simulacion FESTO FLUDISIM

DISTRIBUIDORA DE ZAPATOS Y BOTAS
Marco teórico
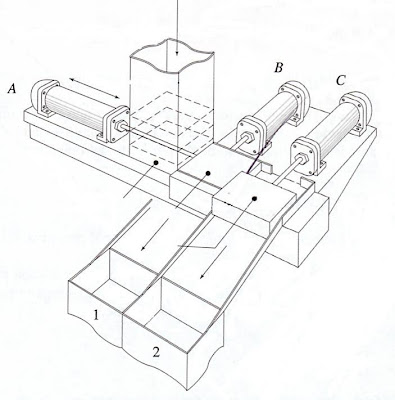
Un sistema de clasificación y empaque de productos de calzado es capaz de diferenciar entre zapatos y botas. La clasificación del producto se hace de acuerdo con dos sensores electrónicos. Cuando llega una caja de zapatos a través del dispositivo de alimentación, deberá activarse un sensor Zl. Si es caja de botas, deberá encenderse al mismo tiempo dos sensores, el Zl y B1 Después de eso, el cilindro A expulsa el producto hacia la zona de empaque, en donde existen dos cilindros, B y C. Si la caja identificada fue de zapatos, el cilindro A recorrerá sólo la mitad de su carrera y regresará de manera inmediata a su posición original. Después de esto, el cilindro B alimenta a la caja 1. Si el producto identificado es de botas, el cilindro A deberá cumplir toda su carrera y regresar en forma inmediata a su posición de origen. Inmediatamente, el cilindro C alimentará a la caja 2. El sistema, además de funcionar en forma automática en todo su ciclo, no depende de ningún operador, sólo del sistema de alimentación.
posible solucion
Sistema realizado en el programa de simulacion FESTO FLUDISIM

SISTEMA DE CORTADO Y ESTAMPADO EN MADERA

ELEMENTOS UTILIZADOS
Bobina o rele: Son componentes pasivos de dos terminales que generan un flujo magnético cuando se hacen circular por ellas una corriente eléctrica. Se fabrican arrollando un hilo conductor sobre un núcleo de material ferromagnético o al aire.
Bobina o rele: Son componentes pasivos de dos terminales que generan un flujo magnético cuando se hacen circular por ellas una corriente eléctrica. Se fabrican arrollando un hilo conductor sobre un núcleo de material ferromagnético o al aire.

sensor inductivo:Los sensores inductivos son una clase especial de sensores que sirven para detectar materiales metálicos ferrosos.

pulsadores n.c/a(normalmente cerrados/abiertos): Elemento que permite el paso o interrupción de la corriente mientras es accionado. Cuando ya no se actúa sobre él vuelve a su posición de reposo.Puede ser el contacto normalmente cerrado en reposo NC, o con el contacto normalmente abierto Na.Consta del botón pulsador; una lámina conductora que establece contacto con los dos terminales al oprimir el botón y un muelle que hace recobrar a la lámina su posición primitiva al cesar la presión sobre el botón pulsador.


contacto nc(normalmete cerrado):su funcion es abrir un circuito cada ves que se energize su bobina o rele electrico. 
contacto na(normalmente abierto):este se cierra cada ves que se energiza su bobina dando paso a la corriente electrica.
graficador:nos muestra el movimiento de las valvulas neumaticas ya sea cuando esten en su maxima estencion o recogida en su totalidad todo esto en el trascurrir de un determinado tiempo.
contacto nc(normalmete cerrado):su funcion es abrir un circuito cada ves que se energize su bobina o rele electrico.
contacto na(normalmente abierto):este se cierra cada ves que se energiza su bobina dando paso a la corriente electrica.

martes, 22 de septiembre de 2009
NEUMATICA
La neumática es la tecnología que emplea el aire comprimido como modo de transmisión de la energía necesaria para mover y hacer funcionar mecanismos. El aire es un material elástico y por tanto, al aplicarle una fuerza, se comprime, mantiene esta compresión y devolverá la energía acumulada cuando se le permita expandirse, según la ley de los gases ideales.
Válvulas neumáticas
Los mandos neumáticos están constituidos por elementos de señalización, elementos de mando y un aporte de trabajo. Los elementos de señalización y mando modulan las fases de trabajo de los elementos de trabajo y se denominan válvulas. Los sistemas neumáticos e hidráulicos están constituidos por:
Elementos de información.
Órganos de mando.
Elementos de trabajo.
Para el tratamiento de la información de mando es preciso emplear aparatos que controlen y dirijan el fluido de forma prestablecida, lo que obliga a disponer de una serie de elementos que efectúen las funciones deseadas relativas al control y dirección del flujo del aire comprimido.
En los principios de la automatización, los elementos rediseñados se mandan manual o mecánicamente. Cuando por necesidades de trabajo se precisaba efectuar el mando a distancia, se utilizan elementos de comando por símbolo neumático (cuervo).
Actualmente, además de los mandos manuales para la actuación de estos elementos, se emplean para el comando procedimientos servo-neumáticos, electro-neumáticos y automáticos que efectúan en su totalidad el tratamiento de la información y de la amplificación de señales.
La gran evolución de la neumática y la hidráulica ha hecho, a su vez, evolucionar los procesos para el tratamiento y amplificación de señales, y por tanto, hoy en día se dispone de una gama muy extensa de válvulas y distribuidores que nos permiten elegir el sistema que mejor se adapte a las necesidades.
Hay veces que el comando se realiza manualmente, y otras nos obliga a recurrir a la electricidad (para automatizar) por razones diversas, sobre todo cuando las distancias son importantes y no existen circunstancias adversas.Las válvulas en términos generales, tienen las siguientes misiones
Distribuir el fluido
Regular caudal
Regular presión
Las válvulas son elementos que mandan o regulan la puesta en marcha, el paro y la dirección, así como la presión o el caudal del fluido enviado por el compresor o almacenado en un depósito.
Esta es la definición de la norma DIN/ISO 1219 conforme a una recomendación del CETOP (Comité Européen des Transmissions Oléohydrauliques et Pneumatiques).
Según su función las válvulas se subdividen en 5 grupos:
Válvulas de vías o distribuidoras
Válvulas de bloqueo
Válvulas de presión
Válvulas de caudal
Válvulas de cierre
Circuitos neumáticos
Hay dos tipos de circuitos neumaticos.Circuito de anillo cerrado: Aquel cuyo final de circuito vuelve al origen evitando brincos por fluctuaciones y ofrecen mayor velocidad de recuperación ante las fugas, ya que el flujo llega por dos lados.
Circuito de anillo abierto: Aquel cuya distribucion se forma por ramificaciones las cuales no retornan al origen, es más económica esta instalación pero hace trabajar más a los compresores cuando hay mucha demanda o fugas en el sistema.
Estos circuito a su vez se pueden dividir en cuatro tipos de sub-sistemas neumáticos:
Sistema manual
Sistemas semiautomáticos
Sistemas automáticos
Sistemas lógicos
Válvulas neumáticas
Los mandos neumáticos están constituidos por elementos de señalización, elementos de mando y un aporte de trabajo. Los elementos de señalización y mando modulan las fases de trabajo de los elementos de trabajo y se denominan válvulas. Los sistemas neumáticos e hidráulicos están constituidos por:
Elementos de información.
Órganos de mando.
Elementos de trabajo.
Para el tratamiento de la información de mando es preciso emplear aparatos que controlen y dirijan el fluido de forma prestablecida, lo que obliga a disponer de una serie de elementos que efectúen las funciones deseadas relativas al control y dirección del flujo del aire comprimido.
En los principios de la automatización, los elementos rediseñados se mandan manual o mecánicamente. Cuando por necesidades de trabajo se precisaba efectuar el mando a distancia, se utilizan elementos de comando por símbolo neumático (cuervo).
Actualmente, además de los mandos manuales para la actuación de estos elementos, se emplean para el comando procedimientos servo-neumáticos, electro-neumáticos y automáticos que efectúan en su totalidad el tratamiento de la información y de la amplificación de señales.
La gran evolución de la neumática y la hidráulica ha hecho, a su vez, evolucionar los procesos para el tratamiento y amplificación de señales, y por tanto, hoy en día se dispone de una gama muy extensa de válvulas y distribuidores que nos permiten elegir el sistema que mejor se adapte a las necesidades.
Hay veces que el comando se realiza manualmente, y otras nos obliga a recurrir a la electricidad (para automatizar) por razones diversas, sobre todo cuando las distancias son importantes y no existen circunstancias adversas.Las válvulas en términos generales, tienen las siguientes misiones
Distribuir el fluido
Regular caudal
Regular presión
Las válvulas son elementos que mandan o regulan la puesta en marcha, el paro y la dirección, así como la presión o el caudal del fluido enviado por el compresor o almacenado en un depósito.
Esta es la definición de la norma DIN/ISO 1219 conforme a una recomendación del CETOP (Comité Européen des Transmissions Oléohydrauliques et Pneumatiques).
Según su función las válvulas se subdividen en 5 grupos:
Válvulas de vías o distribuidoras
Válvulas de bloqueo
Válvulas de presión
Válvulas de caudal
Válvulas de cierre
Circuitos neumáticos
Hay dos tipos de circuitos neumaticos.Circuito de anillo cerrado: Aquel cuyo final de circuito vuelve al origen evitando brincos por fluctuaciones y ofrecen mayor velocidad de recuperación ante las fugas, ya que el flujo llega por dos lados.
Circuito de anillo abierto: Aquel cuya distribucion se forma por ramificaciones las cuales no retornan al origen, es más económica esta instalación pero hace trabajar más a los compresores cuando hay mucha demanda o fugas en el sistema.
Estos circuito a su vez se pueden dividir en cuatro tipos de sub-sistemas neumáticos:
Sistema manual
Sistemas semiautomáticos
Sistemas automáticos
Sistemas lógicos
LOGICA CABLEADA
Lógica cableada
En la acepción de los técnicos electromecánicos, la lógica cableada industrial es la técnica de diseño de pequeños a complejos autómatas utilizados en plantas industriales, básicamente con relés cableados. En la acepción de los técnicos en telecomunicaciones y en informática, la lógica cableada utiliza compuertas lógicas discretas (TTL, CMOS, HCMOS), para implementar circuitos digitales de comunicaciones y computadores.
La lógica cableada industrial consiste en el diseño de automatismos con circuitos cableados entre contactos auxiliares de relés electromecánicos, contactores de potencia, relés temporizados, diodos, relés de protección, válvulas óleo-hidráulicas o neumáticas y otros componentes. Los cableados incluyen funciones de comando y control, de señalización, de protección y de potencia. La potencia además de circuitos eléctricos comprende a los circuitos neumáticos (mando por aire a presión) u óleo hidráulicos (mando por aceite a presión). Crea automatismos rígidos, capaces de realizar una serie de tareas en forma secuencial, sin posibilidad de cambiar variables y parámetros. Si se ha de realizar otra tarea será necesario realizar un nuevo diseño. Se emplea en automatismos pequeños, o en lugares críticos, donde la seguridad de personas y máquinas, no puede depender de la falla de un programa de computación.
n sistemas mayores también se emplea el autómata programable, entre los que se encuentran los PLC controlador lógico programable, la RTU Unidad Terminal Remota o los relés programables, o computadoras o servidores de uso industrial. Estos autómatas no se programan en lenguajes tradicionales como cualquier computador, se programan en Ladder, lenguaje en el cual las instrucciones no son otra cosa que líneas de lógica cableada. Así el conocimiento de la lógica cableada es de fundamental importancia para quien programa un autómata programable o PLC. La lógica cableada más que una técnica, hoy en día constituye una filosofía que permite estructurar circuitos en forma ordenada, prolija y segura, sea en circuitos cableados o programados. La práctica de la lógica cableada ha sido asimilada por otras ramas de la tecnología como las telecomunicaciones y la informática, con la introducción del cableado estructurado en edificios, oficinas y locales comerciales, lugares donde es poco usual el manejo de esquemas y dibujos de las instalaciones eléctricas, excepto la de potencia, la elaboración de proyectos de detalle y el cableado en forma ordenada mediante el uso borneras y regletas, que pasaron a llamarse “patcheras” en el caso de las redes de datos y telefonía.A continuación se describen los elementos, circuitos básicos y la filosofía comúnmente empleada en la lógica cableada. Los dibujos de los componentes presentados no siguen una normativa en particular, correspondiendo al estilo europeo de dibujo de esquemas eléctricos (normas CEI internacional, DIN de Alemania, NF de Francia).Rack de lógica cableada con relés electromecánicos y relés temporizados electrónicos.
Estados OFF y ON
Desde un punto de vista teórico la lógica cableada opera de igual forma que la lógica tradicional, donde las variables solamente pueden tener dos estados posibles, “verdadero” o “falso”. En la lógica cableada “verdadero” es igual a un relé energizado o en ON, en el caso de los contactos el estado “verdadero” es el contacto CERRADO. En la lógica cableada un “falso” es igual a un relé desenergizado o en OFF, para los contactos el estado “falso” es el contacto ABIERTO. o estas puedes ser todas las estradas que cruzan por el circuito primario las abiertas
Variables lógicas empleadas en lógica cableada en comparación con la lógica, circuitos digitales, neumática y óleo-hidráulica.En los circuitos electrónicos digitales o compuerta lógica, se utiliza el sistema numérico binario; donde verdadero es igual a “1” y falso es igual a “0”. Si se trata de un sistema neumático u óleo-hidráulico, “verdadero” es igual a una válvula ABIERTA y “falso” es igual a una válvula CERRADA. Si se trata del mando de la válvula, “verdadero” corresponde al mando accionado (puede ser un solenoide, una palanca de accionamiento manual o un simple volante), y “falso” corresponde al estado no accionado del mando.
Esquemas de conexión y esquemas de principio
Los relés y otros elementos empleados en la técnica de comando y control, pueden ser dibujados con sus bornes de conexión tal cual son físicamente, y luego conectar con conductores los distintos bornes, conformando lo que se denomina un “esquema de conexión”. El esquema de conexión debe dar los datos constructivos y la ubicación de cada elemento, pero no es la mejor forma de representar un circuito a la hora de comprender y visualizar su funcionamiento, como si lo es el esquema de principio.
Esquema de Principio típico de un cableado de comando y control.Dibujos y planos
Los dibujos o planos de los esquemas de conexión y esquemas de principio, antiguamente eran realizados por dibujantes técnicos en folios de papel de gran tamaño, por ejemplo; 1,50 x 2,00 metros, donde se dibujaban todos los cables del circuito en un solo folio. Actualmente los dibujos son realizados directamente por los electricistas, en programas CAD e impresos en hojas A4 o A3. Un circuito de automatización de lógica cableada se dibuja en varias hojas numeradas, y los cables y aparatos son referenciados de una hoja a otra, marcando el número de hoja y las coordenadas columna-fila donde se ubica el cable, borne o aparato cableado.
Ejemplos de diferentes formas de identificar un cableado de lógica cableada.Identificación del cableado y bornerasPara que un circuito de lógica cableada pueda funcionar correctamente, es primordial contar previamente con el dibujo del mismo, donde se identifican todos los cables y borneras de conexión, para luego realizar el montaje y revisar el correcto cableado de todos los elementos. Para que esto último sea posible es necesario colocar identificadores o marcadores alfanuméricos en todos los cables y bornes. Existen distintos criterios para realizar la identificación de los cables, teniendo cada una de ellas sus ventajas y desventajas.
Básicamente se pueden identificar los cables según los números de borneras o regletas de conexión, o de acuerdo a una numeración arbitraria especificado en los planos o dibujos.
Los criterios de identificación del cableado son muchos, algunos apuntan a facilitar el montaje o trabajo del electricista que realiza el cableado, otros facilitan el trabajo del personal de mantenimiento de la instalación, otros son de acuerdo a la conveniencia del proyectista que dibujo los planos.
Algunos de ellos;
1) identificar los cables con el nombre-número de la bornera o borne de conexión a donde llega el cable;
3) identificar los cables con el nombre-número de la bornera o borne de conexión del extremo opuesto del cable;
4) identificar los cables con un número correlativo de 00 a 99, donde ese número está marcado en el dibujo o plano como número del cable, se puede agregar el número de hoja del dibujo donde se encuentra el cable;
5) los números de los cables se corresponden con la numeración de la bornera principal del circuito cuyos números no se repiten en otra bornera;
6) mediante signos, letras y números que denoten la función del cable, como la polaridad +P y –P, mandos de apertura y cierre, funciones de protección, etc.Formación de polaridad de mando en un circuito de lógica cableada; polarización con corriente continua y polarización con corriente alterna.Barras de PolaridadLas barras de polaridad +P y –P son las que permiten energizar las bobinas de los relés con los contactos. Usualmente se denominan +P y –P, pero pueden tener otra letra o leyenda cualquiera, y ser una tensión tanto de corriente continua como de alterna.
La tensión de polaridad, usualmente esta cableada a elementos de control en posible contacto con las personas, por ejemplo; pulsadores manuales, controles de nivel de líquidos, sensores de posición o instrumentos de medida. Por este motivo, por razones de seguridad para las personas, esta tensión debe estar aislada galvánicamente de tierra, usualmente con un aislamiento de 1 a 2 KV. Las tensiones estándar empleadas en corriente continua son; 24, 48, 110, 125, 220 y 250 V.
Las tensiones estándar en corriente alterna son; 24, 110-120, 220-240 y 380-400 VFormación de polaridad de mando en un circuito de lógica cableada de un servicio esencial, donde no puede detenerse el servicio en caso de corte de energía.Servicios EsencialesEn lógicas cableadas para comando y control de servicios esenciales, la corriente continua se respalda con un banco de baterías del tipo estacionario. Si se ha tomado la decisión de usar corriente alterna, el comando y control de servicios esenciales se realiza con un ondulador o inversor CC/CA.
En la acepción de los técnicos electromecánicos, la lógica cableada industrial es la técnica de diseño de pequeños a complejos autómatas utilizados en plantas industriales, básicamente con relés cableados. En la acepción de los técnicos en telecomunicaciones y en informática, la lógica cableada utiliza compuertas lógicas discretas (TTL, CMOS, HCMOS), para implementar circuitos digitales de comunicaciones y computadores.
La lógica cableada industrial consiste en el diseño de automatismos con circuitos cableados entre contactos auxiliares de relés electromecánicos, contactores de potencia, relés temporizados, diodos, relés de protección, válvulas óleo-hidráulicas o neumáticas y otros componentes. Los cableados incluyen funciones de comando y control, de señalización, de protección y de potencia. La potencia además de circuitos eléctricos comprende a los circuitos neumáticos (mando por aire a presión) u óleo hidráulicos (mando por aceite a presión). Crea automatismos rígidos, capaces de realizar una serie de tareas en forma secuencial, sin posibilidad de cambiar variables y parámetros. Si se ha de realizar otra tarea será necesario realizar un nuevo diseño. Se emplea en automatismos pequeños, o en lugares críticos, donde la seguridad de personas y máquinas, no puede depender de la falla de un programa de computación.
n sistemas mayores también se emplea el autómata programable, entre los que se encuentran los PLC controlador lógico programable, la RTU Unidad Terminal Remota o los relés programables, o computadoras o servidores de uso industrial. Estos autómatas no se programan en lenguajes tradicionales como cualquier computador, se programan en Ladder, lenguaje en el cual las instrucciones no son otra cosa que líneas de lógica cableada. Así el conocimiento de la lógica cableada es de fundamental importancia para quien programa un autómata programable o PLC. La lógica cableada más que una técnica, hoy en día constituye una filosofía que permite estructurar circuitos en forma ordenada, prolija y segura, sea en circuitos cableados o programados. La práctica de la lógica cableada ha sido asimilada por otras ramas de la tecnología como las telecomunicaciones y la informática, con la introducción del cableado estructurado en edificios, oficinas y locales comerciales, lugares donde es poco usual el manejo de esquemas y dibujos de las instalaciones eléctricas, excepto la de potencia, la elaboración de proyectos de detalle y el cableado en forma ordenada mediante el uso borneras y regletas, que pasaron a llamarse “patcheras” en el caso de las redes de datos y telefonía.A continuación se describen los elementos, circuitos básicos y la filosofía comúnmente empleada en la lógica cableada. Los dibujos de los componentes presentados no siguen una normativa en particular, correspondiendo al estilo europeo de dibujo de esquemas eléctricos (normas CEI internacional, DIN de Alemania, NF de Francia).Rack de lógica cableada con relés electromecánicos y relés temporizados electrónicos.
Estados OFF y ON
Desde un punto de vista teórico la lógica cableada opera de igual forma que la lógica tradicional, donde las variables solamente pueden tener dos estados posibles, “verdadero” o “falso”. En la lógica cableada “verdadero” es igual a un relé energizado o en ON, en el caso de los contactos el estado “verdadero” es el contacto CERRADO. En la lógica cableada un “falso” es igual a un relé desenergizado o en OFF, para los contactos el estado “falso” es el contacto ABIERTO. o estas puedes ser todas las estradas que cruzan por el circuito primario las abiertas
Variables lógicas empleadas en lógica cableada en comparación con la lógica, circuitos digitales, neumática y óleo-hidráulica.En los circuitos electrónicos digitales o compuerta lógica, se utiliza el sistema numérico binario; donde verdadero es igual a “1” y falso es igual a “0”. Si se trata de un sistema neumático u óleo-hidráulico, “verdadero” es igual a una válvula ABIERTA y “falso” es igual a una válvula CERRADA. Si se trata del mando de la válvula, “verdadero” corresponde al mando accionado (puede ser un solenoide, una palanca de accionamiento manual o un simple volante), y “falso” corresponde al estado no accionado del mando.
Esquemas de conexión y esquemas de principio
Los relés y otros elementos empleados en la técnica de comando y control, pueden ser dibujados con sus bornes de conexión tal cual son físicamente, y luego conectar con conductores los distintos bornes, conformando lo que se denomina un “esquema de conexión”. El esquema de conexión debe dar los datos constructivos y la ubicación de cada elemento, pero no es la mejor forma de representar un circuito a la hora de comprender y visualizar su funcionamiento, como si lo es el esquema de principio.
Esquema de Principio típico de un cableado de comando y control.Dibujos y planos
Los dibujos o planos de los esquemas de conexión y esquemas de principio, antiguamente eran realizados por dibujantes técnicos en folios de papel de gran tamaño, por ejemplo; 1,50 x 2,00 metros, donde se dibujaban todos los cables del circuito en un solo folio. Actualmente los dibujos son realizados directamente por los electricistas, en programas CAD e impresos en hojas A4 o A3. Un circuito de automatización de lógica cableada se dibuja en varias hojas numeradas, y los cables y aparatos son referenciados de una hoja a otra, marcando el número de hoja y las coordenadas columna-fila donde se ubica el cable, borne o aparato cableado.
Ejemplos de diferentes formas de identificar un cableado de lógica cableada.Identificación del cableado y bornerasPara que un circuito de lógica cableada pueda funcionar correctamente, es primordial contar previamente con el dibujo del mismo, donde se identifican todos los cables y borneras de conexión, para luego realizar el montaje y revisar el correcto cableado de todos los elementos. Para que esto último sea posible es necesario colocar identificadores o marcadores alfanuméricos en todos los cables y bornes. Existen distintos criterios para realizar la identificación de los cables, teniendo cada una de ellas sus ventajas y desventajas.
Básicamente se pueden identificar los cables según los números de borneras o regletas de conexión, o de acuerdo a una numeración arbitraria especificado en los planos o dibujos.
Los criterios de identificación del cableado son muchos, algunos apuntan a facilitar el montaje o trabajo del electricista que realiza el cableado, otros facilitan el trabajo del personal de mantenimiento de la instalación, otros son de acuerdo a la conveniencia del proyectista que dibujo los planos.
Algunos de ellos;
1) identificar los cables con el nombre-número de la bornera o borne de conexión a donde llega el cable;
3) identificar los cables con el nombre-número de la bornera o borne de conexión del extremo opuesto del cable;
4) identificar los cables con un número correlativo de 00 a 99, donde ese número está marcado en el dibujo o plano como número del cable, se puede agregar el número de hoja del dibujo donde se encuentra el cable;
5) los números de los cables se corresponden con la numeración de la bornera principal del circuito cuyos números no se repiten en otra bornera;
6) mediante signos, letras y números que denoten la función del cable, como la polaridad +P y –P, mandos de apertura y cierre, funciones de protección, etc.Formación de polaridad de mando en un circuito de lógica cableada; polarización con corriente continua y polarización con corriente alterna.Barras de PolaridadLas barras de polaridad +P y –P son las que permiten energizar las bobinas de los relés con los contactos. Usualmente se denominan +P y –P, pero pueden tener otra letra o leyenda cualquiera, y ser una tensión tanto de corriente continua como de alterna.
La tensión de polaridad, usualmente esta cableada a elementos de control en posible contacto con las personas, por ejemplo; pulsadores manuales, controles de nivel de líquidos, sensores de posición o instrumentos de medida. Por este motivo, por razones de seguridad para las personas, esta tensión debe estar aislada galvánicamente de tierra, usualmente con un aislamiento de 1 a 2 KV. Las tensiones estándar empleadas en corriente continua son; 24, 48, 110, 125, 220 y 250 V.
Las tensiones estándar en corriente alterna son; 24, 110-120, 220-240 y 380-400 VFormación de polaridad de mando en un circuito de lógica cableada de un servicio esencial, donde no puede detenerse el servicio en caso de corte de energía.Servicios EsencialesEn lógicas cableadas para comando y control de servicios esenciales, la corriente continua se respalda con un banco de baterías del tipo estacionario. Si se ha tomado la decisión de usar corriente alterna, el comando y control de servicios esenciales se realiza con un ondulador o inversor CC/CA.



AUTOMATION STUDIO

AUTOMATION STUDIO
Un sofware potente y un poco mas complicado de manejar que los dos anteriores, pero que ofrece variadas alternativas para la simulación y el diseño de circuitos y sistemas hidráulicos, neumáticos y de automatización.
Con esta herramienta estudiamos muy de cerca el funcionamiento y la forma de programación (usamos lenguaje Ladder), del PLC.




FESTO FluidSIM
Otro de los programas que manipulamos en el curso. FluidSim es un software para simulaciones de circuitos neumáticos y electroneumáticos. Su entorno de trabajo es muy intuitivo y didáctico, permitiendo comprender, aprender y visualizar la neumática.
Nuestras practicas con este programa fueron enfocadas para el estudio y asimilación de la lógica cableada, asi como el funcionamiento de los sensores.
EJEMPLOS
Sistema FIFO (El primero que entra es el primero que sale)

Sistema LIFO (El ultimo que entra es el primero que sale)



Sistema LIFO (El ultimo que entra es el primero que sale)
El efecto del rele temporizado a la desconexión. Observe que tambien se puede simular circuitos de potencia (motores).
Circuito de mando para cambio estrella - triangulo
SOFTWARE SIMULADORES

CADE_SIMU.
El primer software que usamos para nuestras practicas en el curso de mantenimiento eléctrico industrial. Se trata de un sencillo y muy liviano programa para la simulacion de circuitos eléctricos, dotado de las herramientas necesarias para la construcción de esquemas de control, (contactores, relés, protecciones térmicas, temporizados, etc., asi como elementos de potencia tales como motores y transformadores.
SISTEMAS DE GENERACION MAS UTILIZADOS
SISTEMA MONOFASICO BIFILAR

SISTEMA MONOFASICO TRIFILAR

SITEMA TRIFASICO TRIFILAR EN "DELTA"

SISTEMA TRIFASICO TETRAFILAR EN "Y¨"

SISTEMA MONOFASICO TRIFILAR
SITEMA TRIFASICO TRIFILAR EN "DELTA"
SISTEMA TRIFASICO TETRAFILAR EN "Y¨"
SITEMA TRIFASICO TRIFILAR EN "DELTA"

SISTEMA TRIFASICO TETRAFILAR EN "Y¨"

SISTEMA TRIFASICO TETRAFILAR EN "Y¨"
CAMBIO DE GIRO MOTOR MONOFASICO

El cambio de giro de un motor monofásico se realiza simplemente cambiando Z1 Y Z2 SE INVERTEN ESTAS DOS FASES y tendremos el cambio de giro
ARRANQUE V ESTRELLA TRIANGULO CON CAMBIO DE GIRO

EL cambio de giro de un motor trifásico lo realizamos cambiando las líneas del motor el tiene L1 L2 L3 entonces podemos invertir la línea 2 y la 3 y así realizamos el cambio de giro en un motor trifásico ademas en el arranque estrella triangulo siempre debe entrar primero la Y y DESPUES LA DELTA sino no estamos haciendo nada ya que al entrar primero la Y esta reduce el comsumo de tension en el arranque del motor en delta.
MOTORES TRIFASICOS
 Motor trifásico.
Motor trifásico.Dentro de los motores de corriente alterna, nos encontramos la clasificación de los motores trifásicos, asíncronos y sincronos.No hay que olvidar que los motores bifásicos y monofásicos, también son de corriente alterna.
Los motores trifásicos tienen ciertas características comunes:En relación con su tensión, éstos motores cuando su utilidad es industrial suelen ser de 230 V y 400 V, para máquinas de pequeña y mediana potencia, siendo considerados de baja tensión. No sobrepasan los 600 KW a 1500 r.p.m.Los motores de mayor tensión, de 500, 3000, 5000, 10000 y 15000 V son dedicados para grandes potencias y los consideramos como motores de alta tensión.Los motores que admiten las conexiones estrella y triángulo, son alimentados por dos tensiones diferentes, 230 V y 400 V, siendo especificado en su placa de características.
Respecto a su frecuencia tenemos que decir que en europa se utilizan los 50 Hz, mientras que en américa se utilizan los 60 Hz.Aunque la frecuencia de red tenga fructuaciones, siempre que no superen el 1%, el motor rendirá perfectamente. Mayores fructuaciones afectará directamente sobre el rendimiento de su potencia. De hecho, para variar la velocidad de esta clase de motores se manipula la frecuencia.
Con respecto a la velocidad los motores trifásico son construidos para velocidades determinadas que corresponden directamente con las polaridades del bobinado y la frecuencia de la red.Respecto a la intensidad, el motor trifásico absorbe de la red la intensidad que necesita, dependiendo siempre de la fase en que se encuentre. Por ésta razón existen diferentes modos de arranques, para ahorrar energía y preservar el motor.En sobrecarga pueden asumir un incremento de la intensidad de hasta 1.5 la intensidad nominal sin sufrir ningún daño durante dos minutos.
ARRANQUE ESTRELLA TRIANGULO MOTORES TRIFASICOS




Estos son los graficos de conecion de un motor Y y uno en delta en las borneras
ARRANQUE ESTRELLA TRIANGULO.
Hay varios tipos de arranques de motor, cada uno con sus peculiaridades y su motivo, en esta ocasión vamos a ver los más empleados en la industria.
Arranque estrella y triángulo.
Las conexiones de un motor son muy sencillas de realizar, para ello el fabricante dispone en la carcasa del motor de una caja de conexiones con 6 bornes, en donde nosotros haremos las conexiones pertinentes, dependiendo de si deseamos una conexión tipo estrella o una conexión tipo triángulo. Veámoslo con unos gráficos:
Ahora bien, puede ser que nos interese hacer, mediante contactores, un cambio de conexión estrella-triángulo, en ese caso solo tenemos que conectar la salida de los contactores a la caja de bornes. El circuito y las conexiones, las podéis estudiar en la siguiente página: estrella-triángulo.
Este tipo de arranque se utiliza para limitar la intensidad absorbida en el momento de arranque del motor. Si disponemos de un motor de 220 V y lo conectamos, en primer lugar, en estrella, tendremos una tensión de 127 V, con la cual, obtendriamos una intensidad 2 veces la nominal. En cambio, si lo hacemos directamente, tendríamos una intensidad de 5 veces la nominal.
Al conectar primero en estrella y después en triángulo, mediante un temporizador, reducimos el sufrimiento del bobinado al rebajar la intensidad de absorción.En la actualidad existen unos equipos llamados arrancadores estrella-triángulo que realizan este cometido de forma mucho más exacta, pues, lo ideal es que se realice el cambio de estrella a triángulo cuando el motor halla alcanzado el 80% de su velocidad nominal.
lunes, 21 de septiembre de 2009
MOTORES MONOFASICOS
Motor monofásico.
Este tipo de motor es muy utilizado en electrodomésticos porque pueden funcionar con redes monofásicas algo que ocurre con nuestras viviendas.En los motores monofásicos no resulta sencillo iniciar el campo giratorio, por lo cual, se tiene que usar algún elemento auxiliar. Dependiendo del método empleado en el arranque, podemos distinguir dos grandes grupos de motores monofásicos:
Motor monofásico de inducción
Su funcionamiento es el mismo que el de los motores asíncronos de inducción. Dentro de este primer grupo disponemos de los siguientes motores:
1. De polos auxiliares o también llamados de fase partida.
2. Con condensador.
3. Con espira en cortocircuito o también llamados de polos partidos.
Motor monofásico de colector.
Son similares a los motores de corriente continua respecto a su funcionamiento.
Existen dos clases de estos motores:
1. Universales.
2. De repulsión.
Motor monofásico de fase partida.
Este tipo de motor tiene dos devanados bien diferenciados, un devanado principal y otro devanado auxiliar. El devanado auxiliar es el que provoca el arranque del motor, gracias a que desfasa un flujo magnético respecto al flujo del devanado principal, de esta manera, logra tener dos fases en el momento del arranque.
Al tener el devanado auxiliar la corriente desfasada respecto a la corriente principal, se genera un campo magnético que facilita el giro del rotor. Cuando la velocidad del giro del rotor acelera el par de motor aumenta. Cuando dicha velocidad está próxima al sincronismo, se logran alcanzar un par de motor tan elevado como en un motor trifásico, o casi. Cuando la velocidad alcanza un 75 % de sincronismo, el devanado auxiliar se desconecta gracias a un interruptor centrífugo que llevan incorporados estos motores de serie, lo cual hace que el motor solo funcione con el devanado principal.
Este tipo de motor dispone de un rotor de jaula de ardilla como los utilizados en los motores trifásicos.El par de motor de éstos motores oscila entre 1500 y 3000 r.p.m., dependiendo si el motor es de 2 ó 4 polos, teniendo unas tensiones de 125 y 220 V. La velocidad es prácticamente constante. Para invertir el giro del motor se intercambian los cables de uno solo de los devanados (principal o auxiliar), algo que se puede realizar facilmente en la caja de conexiones o bornes que viene de serie con el motor.
martes, 17 de marzo de 2009
informe
en primer lugar teniamos 5 resistencias de diferentes colores.
un tablero protoboard, cables, una fuente y un multimetro.
empezamos mirando q colores tenian las ressistencias, despues se saco el valor de cada una de las resistencias.

ya halla la tension de cada una de las resistencias pasamos a hallar la corriente total del circuito, como tenemos la tension de cada resistencia, sacamos la potencia de cada una de las resistencias, como nos dimos cuenta que la potencia no quemarian la resistencia pasamos a la practica.
enpesamos elaborando un circuito en cerie con las resisrencias en la protoboard, despues lo conetamos con el voltaje de corriente directa dado, el cual no los proporciono la fuente.
con el voltimetro pasamos a comprobar si la tension es la misma que la que teniamos nosotros anotado, lo mismo hacemos con el amperimetro y con el ohmimetro.
despues aprendimos como funciona un led (con que tension trabaja, que resistencias podemos utilizar para que trabaje).
despues hicimos otro circuito pero en paralelo con las mismas resistencias utilisadas en el circuito en serie, para dsarnos cuenta que tanta es la diferencia de un circuito a otro.
empesamos como en el circuito en serie, hallamos el valor de la resisrencia y la resistencia total la hallamos con la formula:........

despues hallamos la corriente de cada una de las resistencias y con la formula:
IT= I1+I2+I3+I4+I5
para hallar la corrriente total de todo el circuito, tambien hallamos la potencia de cada una de la resistencias.luego pasamos a la practica y hacemos un circuito en paralelo en la protoboard y con el multimetro comprobamos si los valores que tenemos son iguales
EN CONCLUCION
aprendimos que la ley de OHM es aplicable en ambos circuitos, con la ley de OHM pudimos hallar los valores en cuanto a tension,resistencia y corrinte. los valores los cuales fueron confirmados por el multimetro que son casi exactos.
tambien aprendimos como funciona una Protoboard, también que es un led y cómo funciona.
circuito paralelo
circuito paralelo
El circuito paralelo es una conexión donde, los bornes o terminales de entrada de todos los dispositivos (generadores, resistencias, condensadores, etc.) conectados coincidan entre sí, lo mismo que sus terminales de salida.
Dos depósitos de agua conectados en paralelo tendrán una entrada común que alimentará simultáneamente a ambos, así como una salida común que drenará a ambos a la vez.
Las bombillas de iluminación de una casa forman un circuito en paralelo. Porque si una bombilla se apaga, las demás siguen encendidas.
es decir si rompe un poco de cable solo se apagara a la bombilla a la que pertenece.
A modo de ejemplo, en la siguiente figura se muestran varios condensadores en paralelo y el valor de su equivalente:
Ceq = C1 + C2 + ... + CnLa configuración contraria es el circuito en serie.
En el cual, si una bombilla se apaga todas las demás bombillas se apagaran también.
El circuito paralelo es una conexión donde, los bornes o terminales de entrada de todos los dispositivos (generadores, resistencias, condensadores, etc.) conectados coincidan entre sí, lo mismo que sus terminales de salida.
Dos depósitos de agua conectados en paralelo tendrán una entrada común que alimentará simultáneamente a ambos, así como una salida común que drenará a ambos a la vez.
Las bombillas de iluminación de una casa forman un circuito en paralelo. Porque si una bombilla se apaga, las demás siguen encendidas.
es decir si rompe un poco de cable solo se apagara a la bombilla a la que pertenece.
A modo de ejemplo, en la siguiente figura se muestran varios condensadores en paralelo y el valor de su equivalente:
Ceq = C1 + C2 + ... + CnLa configuración contraria es el circuito en serie.
En el cual, si una bombilla se apaga todas las demás bombillas se apagaran también.
corriente electrica
corriente electrica
Corriente eléctricaLa corriente eléctrica es el flujo de carga por unidad de tiempo que recorre un material. Se debe a un movimiento de los electrones por el interior del material. Se mide en amperios y se indica con el símbolo A. Una corriente eléctrica, puesto que se trata de un movimiento de cargas, produce un campo magnético.Históricamente, la corriente eléctrica se definió como un flujo de cargas positivas y se fijó el sentido convencional de circulación de la corriente como un flujo de cargas desde el polo positivo al negativo. Sin embargo posteriormente se observó, gracias al efecto Hall, que en los metales los portadores de carga son negativas, estos son los electrones, los cuales fluyen en sentido contrario al convencional.
En el siglo XVIII cuando se hicieron los primeros experimentos con electricidad, solo se disponía de carga eléctrica generada por frotamiento o por inducción. Se logró, por primera vez, en 1800 tener un movimiento constante de carga cuando el físico italiano Alessandro Volta inventó, la primera pila eléctrica.El instrumento usado para medir la intensidad de la corriente eléctrica es el galvanómetro que, calibrado en amperios, se llama amperímetro, colocado en serie con el conductor cuya intensidad se desea medir.
Tensión
La tensión, el voltaje o diferencia de potencial es una magnitud física que impulsa a los electrones a lo largo de un conductor en un circuito cerrado. La diferencia de potencial también se define como el trabajo por unidad de carga ejercido por el campo eléctrico, sobre una partícula cargada, para moverla de un lugar a otro.
Diferencia de potencial
La tensión entre dos puntos de un campo eléctrico es igual al trabajo que realiza dicha unidad de carga positiva para transportarla desde el punto A al punto B. En el Sistema Internacional de Unidades, la diferencia de potencial se mide en voltios (V), al igual que el potencial.
La tensión es independiente del camino recorrido por la carga, y depende exclusivamente del potencial eléctrico de los puntos A y B en el campo.
Si dos puntos que tienen una diferencia de potencial se unen mediante un conductor, se producirá un flujo de electrones. Parte de la carga que crea el punto de mayor potencial se trasladará a través del conductor al punto de menor potencial y, en ausencia de una fuente externa (generador), esta corriente cesará cuando ambos puntos igualen su potencial eléctrico (Ley de Henry).
Este traslado de cargas es lo que se conoce como corriente eléctrica.Cuando se habla sobre una diferencia de potencial en un sólo punto, o potencial, se refiere a la diferencia de potencial entre este punto y algún otro donde el potencial sea cero.
Resistencia eléctrica
Se denomina resistencia eléctrica, R, de una sustancia, a la oposición que encuentra la corriente eléctrica para circular a través de dicha sustancia. Su valor viene dado en ohmios, se designa con la letra griega omega mayúscula, Ω, y se mide con el ohmiómetro.
Esta definición es válida para la corriente continua y para la corriente alterna cuando se trate de elementos resistivos puros, esto es, sin componente inductiva ni capacitiva. De existir estos componentes reactivos, la oposición presentada a la circulación de corriente recibe el nombre de impedancia.
Según sea la magnitud de esta oposición, las sustancias se clasifican en conductoras, aislantes y semiconductoras. Existen además ciertos materiales en los que, en determinadas condiciones de temperatura, aparece un fenómeno denominado superconductividad, en el que el valor de la resistencia es prácticamente nulo.
Comportamientos ideal y real
Figura 2. Circuito con resistencia.Una resistencia ideal es un elemento pasivo que disipa energía en forma de calor según la ley de Joule. También establece una relación de proporcionalidad entre la intensidad de corriente que la atraviesa y la tensión medible entre sus extremos, relación conocida como ley de Ohm:
Donde i (t) es la corriente eléctrica que atraviesa la resistencia de valor R y u(t) es la diferencia de potencial que se origina. En general, una resistencia real podrá tener diferente comportamiento en función del tipo de corriente que circule por ella.
Comportamiento en corriente continúaUna resistencia real en corriente continua (CC) se comporta prácticamente de la misma forma que si fuera ideal, esto es, transformando la energía eléctrica en calor. Su ecuación pasa a ser:
Que es la conocida ley de Ohm para CC.Donde
= Tensión=
Corriente
Comportamiento en corriente alterna
Diagrama faso rial.Como se ha comentado anteriormente, una resistencia real muestra un comportamiento diferente del que se observaría en una resistencia ideal si la intensidad que la atraviesa no es continua. En el caso de que la señal aplicada sea senoidal, corriente alterna (CA), a bajas frecuencias se observa que una resistencia real se comportará de forma muy similar a como lo haría en CC, siendo despreciables las diferencias.
En altas frecuencias el comportamiento es diferente, aumentando en la medida en la que aumenta la frecuencia aplicada, lo que se explica fundamentalmente por los efectos inductivos que producen los materiales que conforman la resistencia real. Por ejemplo, en una resistencia de carbón los efectos inductivos solo provienen de los propios terminales de conexión del dispositivo mientras que en una resistencia de tipo bobinado estos efectos se incrementan por el devanado de hilo resistivo alrededor del soporte cerámico, además de aparecer una cierta componente capacitiva si la frecuencia es especialmente elevada.
En estos casos, para analizar los circuitos, la resistencia real se sustituye por una asociación serie formada por una resistencia ideal y por una bobina también ideal, aunque a veces también se les puede añadir un pequeño condensador ideal en paralelo con dicha asociación serie.
En los conductores, además, aparecen otros efectos entre los que cabe destacar el efecto pelicular....Consideremos una resistencia R, como la de la figura 2, a la que se aplica una tensión alterna de valor:De acuerdo con la ley de Ohm circulará una corriente alterna de valor:Donde . Se obtiene así, para la corriente, una función senoidal que está en fase con la tensión aplicada (figura 3).
Si se representa el valor eficaz de la corriente obtenida en forma polar:Y operando matemáticamente:De donde se deduce que en los circuitos de CA la resistencia puede considerarse como una magnitud compleja sin parte imaginaria o, lo que es lo mismo con argumento nulo, cuya representación binómica y polar serán:Asociación de resistencias Resistencia equivalente Figura 4.
Asociaciones generales de resistencias: a) Serie y b) Paralelo. c) Resistencia equivalenteSe denomina resistencia equivalente, RAB, de una asociación respecto de dos puntos A y B, a aquella que conectada la misma diferencia de potencial, UAB, demanda la misma intensidad, I (ver figura 4).
Esto significa que ante las mismas condiciones, la asociación y su resistencia equivalente disipan la misma potencia.
Asociación serieDos o más resistencias se encuentran conectadas en serie cuando al aplicar al conjunto una diferencia de potencial, todas ellas son recorridas por la misma corriente.
Para determinar la resistencia equivalente de una asociación serie imaginaremos que ambas, figuras 4a) y 4c), están conectadas a la misma diferencia de potencial, UAB. Si aplicamos la segunda ley de Kirchhoff a la asociación en serie tendremos:Aplicando la ley de Ohm:En la resistencia equivalente:Finalmente, igualando ambas ecuaciones se obtiene que:Y eliminando la intensidad:Por lo tanto la resistencia equivalente a n resistencias montadas en serie es igual a la suma de dichas resistencias.Asociación paraleloDos o más resistencias se encuentran en paralelo cuando tienen dos terminales comunes de modo que al aplicar al conjunto una diferencia de potencial, UAB, todas las resistencias tienen la misma caída de tensión, UAB.Para determinar la resistencia equivalente de una asociación en paralelo imaginaremos que ambas, figuras 4b) y 4c), están conectadas a la misma diferencia de potencial mencionada, UAB, lo que originará una misma demanda de corriente eléctrica, I. Esta corriente se repartirá en la asociación por cada una de sus resistencias de acuerdo con la primera ley de Kirchhoff:
Aplicando la ley de Ohm:
En la resistencia equivalente se cumple:
Igualando ambas ecuaciones y eliminando la tensión UAB:
De donde:
Por lo que la resistencia equivalente de una asociación en paralelo es igual a la inversa de la suma de las inversas de cada una de las resistencias.
Existen dos casos particulares que suelen darse en una asociación en paralelo:
1. Dos resistencias: En este caso se puede comprobar que la resistencia equivalente es igual al producto dividido por la suma de sus valores, esto es:
2. k resistencias iguales: Su equivalente resulta ser:Asociación mixtaFigura 5. Asociaciones mixtas de cuatro resistencias: a) Serie de paralelos, b) Paralelo de series y c) Ejemplo de una de las otras posibles conexiones.
En una asociación mixta podemos encontrarnos conjuntos de resistencias en serie con conjuntos de resistencias en paralelo. En la figura 5 pueden observarse tres ejemplos de asociaciones mixtas con cuatro resistencias.
A veces una asociación mixta es necesaria ponerla en modo texto. Para ello se utilizan los símbolos "+" y "//" para designar las asociaciones serie y paralelo respectivamente.
Así con (R1 + R2) se indica que R1 y R2 están en serie mientras que con (R1//R2) que están en paralelo. De acuerdo con ello, las asociaciones de la figura 5 se pondrían del siguiente modo:
a)(R1//R2)+(R3//R4)
b) (R1+R3)//(R2+R4
)c) ((R1+R2)//R3)+R4Para determinar la resistencia equivalente de una asociación mixta se van simplificando las resistencias que están en serie y las que están en paralelo de modo que el conjunto vaya resultando cada vez más sencillo, hasta terminar con un conjunto en serie o en paralelo. Como ejemplo se determinarán las resistencias equivalentes de cada una de las asociaciones de la figura 5:
a)
R1//R2 = R1//2
R3//R4 = R3//4
RAB = R1//2 + R3//4
b)
R1+R3 = R1+3
R2+R4 = R2+4
RAB = (R1+3 · R2+4)//(R1+3 + R2+4)
c)
R1+R2 = R1+2
R1+2//R3 = R1+2//3
RAB = R1+2//3 + R4
Asociaciones estrella y triángulo
Figura 6. Asociaciones: a) En estrella y b) En triángulo.En la figura 6a) y b) pueden observarse respectivamente las asociaciones estrella y triángulo, también llamadas T y π o delta respectivamente. Este tipo de asociaciones son comunes en las cargas trifásicas. Las ecuaciones de equivalencia entre ambas asociaciones vienen dadas por el teorema de Kenelly, de donde se deduce que los valores de la estrella en función de los del triángulo (transformación triángulo a estrella) son:Y los del triángulo en función de la estrella (transformación estrella a triángulo):
Asociación puente
Figura 7. Asociación puente.
Si en una asociación paralela de series como la mostrada en la figura 5b se conecta una resistencia que una las dos ramas en paralelo, se obtiene una asociación puente como la mostrada en la figura 7.
La determinación de la resistencia equivalente de este tipo de asociación tiene sólo interés pedagógico. Para ello se sustituye bien una de las configuraciones en triangulo de la asociación, la R2-R4-R5 o la R3-R4-R5 por su equivalente en estrella, bien una de las configuraciones en estrella, la R1-R3-R5 o la R3-R4-R5 por su equivalente en triángulo. En ambos casos se consigue transformar el conjunto en una asociación mixta de cálculo sencillo. Otro método consiste en aplicar una fem (E) a la asociación y obtener su resistencia equivalente como relación de dicha fem y la corriente total demandada (E/I).
El interés de este tipo de asociación está en el caso en el que por la resistencia central, R5, no circula corriente, pues permite calcular los valores de una de las resitencias, R1, R2, R3 o R4, en función de las otras tres.
En ello se basan los puentes de Wheatstone y de hilo para la medida de resistencias con precisión.
Resistencia de un conductor
El conductor es el encargado de unir eléctricamente cada uno de los componentes de un circuito. Dado que tiene resistencia óhmica, puede ser considerado como otro componente más con características similares a las de la resistencia eléctrica.
De este modo, la resistencia de un conductor eléctrico es la medida de la oposición que presenta al movimiento de los electrones en su seno, o sea la oposición que presenta al paso de la corriente eléctrica. Generalmente su valor es muy pequeño y por ello se suele despreciar, esto es, se considera que su resistencia es nula (conductor ideal), pero habrá casos particulares en los que se deberá tener en cuenta su resistencia (conductor real).
La resistencia de un conductor depende de la longitud del mismo ( ), de su sección ( ), del tipo de material y de la temperatura. Si consideramos la temperatura constante (20 ºC), la resistencia viene dada por la siguiente expresión:En la que es la resistividad (una característica propia de cada material).
Influencia de la temperatura
La variación de la temperatura produce una variación en la resistencia. En la mayoría de los metales aumenta su resistencia al aumentar la temperatura, por el contrario, en otros elementos, como el carbono o el germanio la resistencia disminuye.
Como ya se comentó, en algunos materiales la resistencia llega a desaparecer cuando la temperatura baja lo suficiente. En este caso se habla de superconductores.Experimentalmente se comprueba que para temperaturas no muy elevadas, la resistencia a un determinado valor de t ( ), viene dada por la expresión:
Donde
= Resistencia de referencia a 20°C.
= Coeficiente Olveriano de temperatura.
= Diferencia de temperatura respecto a los 20°C (t-20).
Potencia que disipa una resistencia
Una resistencia disipa en calor una cantidad de potencia proporcional a la intensidad que la atraviesa y a la caída de tensión que aparece en sus bornes. Esto es , aunque suele ser más cómodo usar la ley de Joule .
Observando las dimensiones del cuerpo de la resistencia, las características de conductividad de calor del material que la forma y que la recubre, y el ambiente en el cual está pensado que opere, el fabricante calcula la potencia que es capaz de disipar cada resistencia como componente discreto, sin que el aumento de temperatura provoque su destrucción.
Esta temperatura de fallo puede ser muy distinta según los materiales que se estén usando. Esto es, una resistencia de 2W formada por un material que no soporte mucha temperatura, estará casi fría (y será grande); pero formada por un material metálico, con recubrimiento cerámico, podría alcanzar altas temperaturas (y podrá ser mucho más pequeña).
El fabricante dará como dato el valor en vatios que puede disipar cada resistencia en cuestión. Este valor puede estar escrito en el cuerpo del componente o se tiene que deducir de comparar su tamaño con los tamaños estándar y sus respectivas potencias.
El tamaño de las resistencias comunes, cuerpo cilíndrico con 2 terminales, que aparecen en los aparatos eléctricos domésticos suelen ser de 1/4 W, existiendo otros valores de potencias de comerciales de 1/2 W, 1 W, 2 W, etc.Potencia eléctricaSe define como la cantidad de trabajo por unidad de tiempo realizado por una corriente eléctrica.Potencia en corriente continuaCuando se trata de corriente continua (CC) la potencia eléctrica desarrollada en un cierto instante por un dispositivo de dos terminales es el producto de la diferencia de potencial entre dichos terminales y la intensidad de corriente que pasa a través del dispositivo.
Esto es,(1)Donde I es el valor instantáneo de la corriente y V es el valor instantáneo del voltaje. Si I se expresa en amperios y V en voltios, P estará expresada en wats Vatios.
Igual definición se aplica cuando se consideran valores promedio para I, V y P.
Cuando el dispositivo es una resistencia de valor R o se puede calcular la resistencia equivalente del dispositivo, la potencia también puede calcularse comoPotencia en corriente alterna [editar]Cuando se trata de corriente alterna (AC) sinusoidal, el promedio de potencia eléctrica desarrollada por un dispositivo de dos terminales es una función de los valores eficaces o valores cuadráticos medios, de la diferencia de potencial entre los terminales y de la intensidad de corriente que pasa a través del dispositivo.
En el caso de un circuito de carácter inductivo (caso más común) al que se aplica una tensión sinusoidal con velocidad angular y valor de pico resulta:
Esto provocará una corriente retrasada un ángulo respecto de la tensión aplicada:
La potencia instantánea vendrá dada como el producto de las expresiones anteriores:
Mediante trigonometría, la anterior expresión puede transformarse en la siguiente:
Y sustituyendo los valores de pico por los eficaces:Se obtiene así para la potencia un valor constante, y otro variable con el tiempo, .
Al primer valor se le denomina potencia activa y al segundo potencia fluctuante.Potencia fluctuante
Al ser la potencia fluctuante de forma senoidal, su valor medio será cero.
Para entender mejor qué es la potencia fluctuante, imaginemos un circuito que sólo tuviera una potencia de este tipo.
Ello sólo es posible si rad (cos±90º=0), quedandoCaso que corresponde a un circuito inductivo puro o capacitivo puro.
Por lo tanto la potencia fluctuante es debida a un solenoide ó a un condensador. Tales elementos no consumen energía sino que la almacenan en forma de campo magnético y campo eléctrico.
Componentes de la intensidad Figura 1.
- Componentes activa y reactiva de la intensidad; supuesto inductivo, izquierdo y capacitivo, derechaConsideremos un circuito de C. A. en el que la corriente y la tensión tienen un desfase φ. Se define componente activa de la intensidad, Ia, a la componente de ésta que está en fase con la tensión, y componente reactiva, Ir, a la que está en cuadratura con ella (véase Figura 1).
Sus valores son:El producto de la intensidad, I, y las de sus componentes activa, Ia, y reactiva, Ir, por la tensión, V, da como resultado las potencias aparente (S), activa (P) y reactiva (Q), respectivamente:
Potencia aparente Figura 2.
- Relación entre potencias activas, aparentes y reactivasLa potencia aparente (también llamada compleja) de un circuito eléctrico de corriente alterna es la suma (vectorial) de la energía que disipa dicho circuito en cierto tiempo en forma de calor o trabajo y la energía utilizada para la formación de los campos eléctricos y magnéticos de sus componentes que fluctuara entre estos componentes y la fuente de energía.Esta potencia no es la realmente consumida "útil", salvo cuando el factor de potencia es la unidad (cos φ=1), y señala que la red de alimentación de un circuito no sólo ha de satisfacer la energía consumida por los elementos resistivos, sino que también ha de contarse con la que van a "almacenar" bobinas y condensadores. Se la designa con la letra S y se mide en voltiamperios (VA).
Su formula es:
Potencia activa
Es la potencia que representa la capacidad de un circuito para realizar un proceso de transformación de la energía eléctrica en trabajo.
Los diferentes dispositivos eléctricos existentes convierten la energía eléctrica en otras formas de energía tales como: mecánica, lumínica, térmica, química, etc.
Esta potencia es, por lo tanto, la realmente consumida por los circuitos. Cuando se habla de demanda eléctrica, es esta potencia la que se utiliza para determinar dicha demanda.
Se designa con la letra P y se mide en vatios (W). De acuerdo con su expresión, la ley de Ohm y el triángulo de impedancias:Resultado que indica que la potencia activa es debida a los elementos resistivos.
Potencia reactivaEsta potencia no tiene tampoco el carácter realmente de ser consumida y sólo aparecerá cuando existan bobinas o condensadores en los circuitos. La potencia reactiva tiene un valor medio nulo, por lo que no produce trabajo útil.
Por ello que se dice que es una potencia desvatada (no produce vatios), se mide en voltiamperios reactivos (VAR) y se designa con la letra Q.A partir de su expresión,Lo que reafirma en que esta potencia es debida únicamente a los elementos reactivos.
Potencia trifásicaLa representación matemática de la potencia activa en un sistema trifásico equilibrado está dada por la ecuación:
Energía eléctrica
Consumo de energía eléctrica por país, en millones de kWh.
Se denomina energía eléctrica a la forma de energía que resulta de la existencia de una diferencia de potencial entre dos puntos, lo que permite establecer una corriente eléctrica entre ambos —cuando se les pone en contacto por medio de un conductor eléctrico— y obtener trabajo.
La energía eléctrica puede transformarse en muchas otras formas de energía, tales como la energía luminosa o luz, la energía mecánica y la energía térmica.
Su uso es una de las bases de la tecnología utilizada por el ser humano en la actualidad.La energía eléctrica se manifiesta como corriente eléctrica, es decir, como el movimiento de cargas eléctricas negativas, o electrones, a través de un cable conductor metálico como consecuencia de la diferencia de potencial que un generador esté aplicando en sus extremos.
Cada vez que se acciona un interruptor, se cierra un circuito eléctrico y se genera el movimiento de electrones a través del cable conductor.
Las cargas que se desplazan forman parte de los átomos de— que se desea utilizar, mediante las correspondientes transformaciones; por ejemplo, cuando la energía eléctrica llega a una enceradora, se convierte en energía mecánica, calórica y en algunos casos luminosa, gracias al motor eléctrico y a las distintas piezas mecánicas del aparato.
Fuentes de energía eléctricaLa energía eléctrica apenas existe libre en la naturaleza de manera aprovechable.
El ejemplo más relevante y habitual de esta manifestación son las tormentas eléctricas. La electricidad tampoco tiene una utilidad biológica directa para el ser humano, salvo en aplicaciones muy singulares, como pudiera ser el uso de corrientes en medicina, resultando en cambio normalmente desagradable e incluso peligrosa, según las circunstancias.
Sin embargo es una de las más utilizadas, una vez aplicada a procesos y aparatos de la más diversa naturaleza, debido fundamentalmente a su limpieza y a la facilidad con la que se le genera, transporta y convierte en otras formas de energía.
Para contrarrestar todas estas virtudes hay que reseñar la dificultad que presenta su almacenamiento directo en los aparatos llamados acumuladores.
La generación de energía eléctrica se lleva a cabo mediante técnicas muy diferentes. Las que suministran las mayores cantidades y potencias de electricidad aprovechan un movimiento rotatorio para generar corriente continua en un dinamo o corriente alterna en un alternador.
El movimiento rotatorio resulta a su vez de una fuente de energía mecánica directa, como puede ser la corriente de un salto de agua o la producida por el viento, o de un ciclo termodinámico.
En este último caso se calienta un fluido, al que se hace recorrer un circuito en el que mueve un motor o una turbina.
El calor de este proceso se obtiene mediante la quema de combustibles fósiles, reacciones nucleares y otros procesos.La generación de energía eléctrica es una actividad humana básica, ya que está directamente relacionada con los requerimientos actuales del hombre.
Todas la formas de utilización de las fuentes de energía, tanto las habituales como las denominadas alternativas o no convencionales, agreden en mayor o menor medida el ambiente, siendo de todos modos la energía eléctrica una de las que causan menor impacto.La energía eléctrica se crea por el movimiento de los electrones, para que este movimiento sea continuo, tenemos que suministrar electrones por el extremo positivo para dejar que se escapen o salgan por el negativo; para poder conseguir esto, necesitamos mantener un campo eléctrico en el interior del conductor (metal, etc.).
Estos aparatos construidos con el fin de crear electricidad se llaman generadores eléctricos. Claro que hay diferentes formas de crearla, eólicamente, hidráulicamente, de forma geotérmica y muchas más.
Corriente eléctricaLa corriente eléctrica es el flujo de carga por unidad de tiempo que recorre un material. Se debe a un movimiento de los electrones por el interior del material. Se mide en amperios y se indica con el símbolo A. Una corriente eléctrica, puesto que se trata de un movimiento de cargas, produce un campo magnético.Históricamente, la corriente eléctrica se definió como un flujo de cargas positivas y se fijó el sentido convencional de circulación de la corriente como un flujo de cargas desde el polo positivo al negativo. Sin embargo posteriormente se observó, gracias al efecto Hall, que en los metales los portadores de carga son negativas, estos son los electrones, los cuales fluyen en sentido contrario al convencional.
En el siglo XVIII cuando se hicieron los primeros experimentos con electricidad, solo se disponía de carga eléctrica generada por frotamiento o por inducción. Se logró, por primera vez, en 1800 tener un movimiento constante de carga cuando el físico italiano Alessandro Volta inventó, la primera pila eléctrica.El instrumento usado para medir la intensidad de la corriente eléctrica es el galvanómetro que, calibrado en amperios, se llama amperímetro, colocado en serie con el conductor cuya intensidad se desea medir.
Tensión
La tensión, el voltaje o diferencia de potencial es una magnitud física que impulsa a los electrones a lo largo de un conductor en un circuito cerrado. La diferencia de potencial también se define como el trabajo por unidad de carga ejercido por el campo eléctrico, sobre una partícula cargada, para moverla de un lugar a otro.
Diferencia de potencial
La tensión entre dos puntos de un campo eléctrico es igual al trabajo que realiza dicha unidad de carga positiva para transportarla desde el punto A al punto B. En el Sistema Internacional de Unidades, la diferencia de potencial se mide en voltios (V), al igual que el potencial.
La tensión es independiente del camino recorrido por la carga, y depende exclusivamente del potencial eléctrico de los puntos A y B en el campo.
Si dos puntos que tienen una diferencia de potencial se unen mediante un conductor, se producirá un flujo de electrones. Parte de la carga que crea el punto de mayor potencial se trasladará a través del conductor al punto de menor potencial y, en ausencia de una fuente externa (generador), esta corriente cesará cuando ambos puntos igualen su potencial eléctrico (Ley de Henry).
Este traslado de cargas es lo que se conoce como corriente eléctrica.Cuando se habla sobre una diferencia de potencial en un sólo punto, o potencial, se refiere a la diferencia de potencial entre este punto y algún otro donde el potencial sea cero.
Resistencia eléctrica
Se denomina resistencia eléctrica, R, de una sustancia, a la oposición que encuentra la corriente eléctrica para circular a través de dicha sustancia. Su valor viene dado en ohmios, se designa con la letra griega omega mayúscula, Ω, y se mide con el ohmiómetro.
Esta definición es válida para la corriente continua y para la corriente alterna cuando se trate de elementos resistivos puros, esto es, sin componente inductiva ni capacitiva. De existir estos componentes reactivos, la oposición presentada a la circulación de corriente recibe el nombre de impedancia.
Según sea la magnitud de esta oposición, las sustancias se clasifican en conductoras, aislantes y semiconductoras. Existen además ciertos materiales en los que, en determinadas condiciones de temperatura, aparece un fenómeno denominado superconductividad, en el que el valor de la resistencia es prácticamente nulo.
Comportamientos ideal y real
Figura 2. Circuito con resistencia.Una resistencia ideal es un elemento pasivo que disipa energía en forma de calor según la ley de Joule. También establece una relación de proporcionalidad entre la intensidad de corriente que la atraviesa y la tensión medible entre sus extremos, relación conocida como ley de Ohm:
Donde i (t) es la corriente eléctrica que atraviesa la resistencia de valor R y u(t) es la diferencia de potencial que se origina. En general, una resistencia real podrá tener diferente comportamiento en función del tipo de corriente que circule por ella.
Comportamiento en corriente continúaUna resistencia real en corriente continua (CC) se comporta prácticamente de la misma forma que si fuera ideal, esto es, transformando la energía eléctrica en calor. Su ecuación pasa a ser:
Que es la conocida ley de Ohm para CC.Donde
= Tensión=
Corriente
Comportamiento en corriente alterna
Diagrama faso rial.Como se ha comentado anteriormente, una resistencia real muestra un comportamiento diferente del que se observaría en una resistencia ideal si la intensidad que la atraviesa no es continua. En el caso de que la señal aplicada sea senoidal, corriente alterna (CA), a bajas frecuencias se observa que una resistencia real se comportará de forma muy similar a como lo haría en CC, siendo despreciables las diferencias.
En altas frecuencias el comportamiento es diferente, aumentando en la medida en la que aumenta la frecuencia aplicada, lo que se explica fundamentalmente por los efectos inductivos que producen los materiales que conforman la resistencia real. Por ejemplo, en una resistencia de carbón los efectos inductivos solo provienen de los propios terminales de conexión del dispositivo mientras que en una resistencia de tipo bobinado estos efectos se incrementan por el devanado de hilo resistivo alrededor del soporte cerámico, además de aparecer una cierta componente capacitiva si la frecuencia es especialmente elevada.
En estos casos, para analizar los circuitos, la resistencia real se sustituye por una asociación serie formada por una resistencia ideal y por una bobina también ideal, aunque a veces también se les puede añadir un pequeño condensador ideal en paralelo con dicha asociación serie.
En los conductores, además, aparecen otros efectos entre los que cabe destacar el efecto pelicular....Consideremos una resistencia R, como la de la figura 2, a la que se aplica una tensión alterna de valor:De acuerdo con la ley de Ohm circulará una corriente alterna de valor:Donde . Se obtiene así, para la corriente, una función senoidal que está en fase con la tensión aplicada (figura 3).
Si se representa el valor eficaz de la corriente obtenida en forma polar:Y operando matemáticamente:De donde se deduce que en los circuitos de CA la resistencia puede considerarse como una magnitud compleja sin parte imaginaria o, lo que es lo mismo con argumento nulo, cuya representación binómica y polar serán:Asociación de resistencias Resistencia equivalente Figura 4.
Asociaciones generales de resistencias: a) Serie y b) Paralelo. c) Resistencia equivalenteSe denomina resistencia equivalente, RAB, de una asociación respecto de dos puntos A y B, a aquella que conectada la misma diferencia de potencial, UAB, demanda la misma intensidad, I (ver figura 4).
Esto significa que ante las mismas condiciones, la asociación y su resistencia equivalente disipan la misma potencia.
Asociación serieDos o más resistencias se encuentran conectadas en serie cuando al aplicar al conjunto una diferencia de potencial, todas ellas son recorridas por la misma corriente.
Para determinar la resistencia equivalente de una asociación serie imaginaremos que ambas, figuras 4a) y 4c), están conectadas a la misma diferencia de potencial, UAB. Si aplicamos la segunda ley de Kirchhoff a la asociación en serie tendremos:Aplicando la ley de Ohm:En la resistencia equivalente:Finalmente, igualando ambas ecuaciones se obtiene que:Y eliminando la intensidad:Por lo tanto la resistencia equivalente a n resistencias montadas en serie es igual a la suma de dichas resistencias.Asociación paraleloDos o más resistencias se encuentran en paralelo cuando tienen dos terminales comunes de modo que al aplicar al conjunto una diferencia de potencial, UAB, todas las resistencias tienen la misma caída de tensión, UAB.Para determinar la resistencia equivalente de una asociación en paralelo imaginaremos que ambas, figuras 4b) y 4c), están conectadas a la misma diferencia de potencial mencionada, UAB, lo que originará una misma demanda de corriente eléctrica, I. Esta corriente se repartirá en la asociación por cada una de sus resistencias de acuerdo con la primera ley de Kirchhoff:
Aplicando la ley de Ohm:
En la resistencia equivalente se cumple:
Igualando ambas ecuaciones y eliminando la tensión UAB:
De donde:
Por lo que la resistencia equivalente de una asociación en paralelo es igual a la inversa de la suma de las inversas de cada una de las resistencias.
Existen dos casos particulares que suelen darse en una asociación en paralelo:
1. Dos resistencias: En este caso se puede comprobar que la resistencia equivalente es igual al producto dividido por la suma de sus valores, esto es:
2. k resistencias iguales: Su equivalente resulta ser:Asociación mixtaFigura 5. Asociaciones mixtas de cuatro resistencias: a) Serie de paralelos, b) Paralelo de series y c) Ejemplo de una de las otras posibles conexiones.
En una asociación mixta podemos encontrarnos conjuntos de resistencias en serie con conjuntos de resistencias en paralelo. En la figura 5 pueden observarse tres ejemplos de asociaciones mixtas con cuatro resistencias.
A veces una asociación mixta es necesaria ponerla en modo texto. Para ello se utilizan los símbolos "+" y "//" para designar las asociaciones serie y paralelo respectivamente.
Así con (R1 + R2) se indica que R1 y R2 están en serie mientras que con (R1//R2) que están en paralelo. De acuerdo con ello, las asociaciones de la figura 5 se pondrían del siguiente modo:
a)(R1//R2)+(R3//R4)
b) (R1+R3)//(R2+R4
)c) ((R1+R2)//R3)+R4Para determinar la resistencia equivalente de una asociación mixta se van simplificando las resistencias que están en serie y las que están en paralelo de modo que el conjunto vaya resultando cada vez más sencillo, hasta terminar con un conjunto en serie o en paralelo. Como ejemplo se determinarán las resistencias equivalentes de cada una de las asociaciones de la figura 5:
a)
R1//R2 = R1//2
R3//R4 = R3//4
RAB = R1//2 + R3//4
b)
R1+R3 = R1+3
R2+R4 = R2+4
RAB = (R1+3 · R2+4)//(R1+3 + R2+4)
c)
R1+R2 = R1+2
R1+2//R3 = R1+2//3
RAB = R1+2//3 + R4
Asociaciones estrella y triángulo
Figura 6. Asociaciones: a) En estrella y b) En triángulo.En la figura 6a) y b) pueden observarse respectivamente las asociaciones estrella y triángulo, también llamadas T y π o delta respectivamente. Este tipo de asociaciones son comunes en las cargas trifásicas. Las ecuaciones de equivalencia entre ambas asociaciones vienen dadas por el teorema de Kenelly, de donde se deduce que los valores de la estrella en función de los del triángulo (transformación triángulo a estrella) son:Y los del triángulo en función de la estrella (transformación estrella a triángulo):
Asociación puente
Figura 7. Asociación puente.
Si en una asociación paralela de series como la mostrada en la figura 5b se conecta una resistencia que una las dos ramas en paralelo, se obtiene una asociación puente como la mostrada en la figura 7.
La determinación de la resistencia equivalente de este tipo de asociación tiene sólo interés pedagógico. Para ello se sustituye bien una de las configuraciones en triangulo de la asociación, la R2-R4-R5 o la R3-R4-R5 por su equivalente en estrella, bien una de las configuraciones en estrella, la R1-R3-R5 o la R3-R4-R5 por su equivalente en triángulo. En ambos casos se consigue transformar el conjunto en una asociación mixta de cálculo sencillo. Otro método consiste en aplicar una fem (E) a la asociación y obtener su resistencia equivalente como relación de dicha fem y la corriente total demandada (E/I).
El interés de este tipo de asociación está en el caso en el que por la resistencia central, R5, no circula corriente, pues permite calcular los valores de una de las resitencias, R1, R2, R3 o R4, en función de las otras tres.
En ello se basan los puentes de Wheatstone y de hilo para la medida de resistencias con precisión.
Resistencia de un conductor
El conductor es el encargado de unir eléctricamente cada uno de los componentes de un circuito. Dado que tiene resistencia óhmica, puede ser considerado como otro componente más con características similares a las de la resistencia eléctrica.
De este modo, la resistencia de un conductor eléctrico es la medida de la oposición que presenta al movimiento de los electrones en su seno, o sea la oposición que presenta al paso de la corriente eléctrica. Generalmente su valor es muy pequeño y por ello se suele despreciar, esto es, se considera que su resistencia es nula (conductor ideal), pero habrá casos particulares en los que se deberá tener en cuenta su resistencia (conductor real).
La resistencia de un conductor depende de la longitud del mismo ( ), de su sección ( ), del tipo de material y de la temperatura. Si consideramos la temperatura constante (20 ºC), la resistencia viene dada por la siguiente expresión:En la que es la resistividad (una característica propia de cada material).
Influencia de la temperatura
La variación de la temperatura produce una variación en la resistencia. En la mayoría de los metales aumenta su resistencia al aumentar la temperatura, por el contrario, en otros elementos, como el carbono o el germanio la resistencia disminuye.
Como ya se comentó, en algunos materiales la resistencia llega a desaparecer cuando la temperatura baja lo suficiente. En este caso se habla de superconductores.Experimentalmente se comprueba que para temperaturas no muy elevadas, la resistencia a un determinado valor de t ( ), viene dada por la expresión:
Donde
= Resistencia de referencia a 20°C.
= Coeficiente Olveriano de temperatura.
= Diferencia de temperatura respecto a los 20°C (t-20).
Potencia que disipa una resistencia
Una resistencia disipa en calor una cantidad de potencia proporcional a la intensidad que la atraviesa y a la caída de tensión que aparece en sus bornes. Esto es , aunque suele ser más cómodo usar la ley de Joule .
Observando las dimensiones del cuerpo de la resistencia, las características de conductividad de calor del material que la forma y que la recubre, y el ambiente en el cual está pensado que opere, el fabricante calcula la potencia que es capaz de disipar cada resistencia como componente discreto, sin que el aumento de temperatura provoque su destrucción.
Esta temperatura de fallo puede ser muy distinta según los materiales que se estén usando. Esto es, una resistencia de 2W formada por un material que no soporte mucha temperatura, estará casi fría (y será grande); pero formada por un material metálico, con recubrimiento cerámico, podría alcanzar altas temperaturas (y podrá ser mucho más pequeña).
El fabricante dará como dato el valor en vatios que puede disipar cada resistencia en cuestión. Este valor puede estar escrito en el cuerpo del componente o se tiene que deducir de comparar su tamaño con los tamaños estándar y sus respectivas potencias.
El tamaño de las resistencias comunes, cuerpo cilíndrico con 2 terminales, que aparecen en los aparatos eléctricos domésticos suelen ser de 1/4 W, existiendo otros valores de potencias de comerciales de 1/2 W, 1 W, 2 W, etc.Potencia eléctricaSe define como la cantidad de trabajo por unidad de tiempo realizado por una corriente eléctrica.Potencia en corriente continuaCuando se trata de corriente continua (CC) la potencia eléctrica desarrollada en un cierto instante por un dispositivo de dos terminales es el producto de la diferencia de potencial entre dichos terminales y la intensidad de corriente que pasa a través del dispositivo.
Esto es,(1)Donde I es el valor instantáneo de la corriente y V es el valor instantáneo del voltaje. Si I se expresa en amperios y V en voltios, P estará expresada en wats Vatios.
Igual definición se aplica cuando se consideran valores promedio para I, V y P.
Cuando el dispositivo es una resistencia de valor R o se puede calcular la resistencia equivalente del dispositivo, la potencia también puede calcularse comoPotencia en corriente alterna [editar]Cuando se trata de corriente alterna (AC) sinusoidal, el promedio de potencia eléctrica desarrollada por un dispositivo de dos terminales es una función de los valores eficaces o valores cuadráticos medios, de la diferencia de potencial entre los terminales y de la intensidad de corriente que pasa a través del dispositivo.
En el caso de un circuito de carácter inductivo (caso más común) al que se aplica una tensión sinusoidal con velocidad angular y valor de pico resulta:
Esto provocará una corriente retrasada un ángulo respecto de la tensión aplicada:
La potencia instantánea vendrá dada como el producto de las expresiones anteriores:
Mediante trigonometría, la anterior expresión puede transformarse en la siguiente:
Y sustituyendo los valores de pico por los eficaces:Se obtiene así para la potencia un valor constante, y otro variable con el tiempo, .
Al primer valor se le denomina potencia activa y al segundo potencia fluctuante.Potencia fluctuante
Al ser la potencia fluctuante de forma senoidal, su valor medio será cero.
Para entender mejor qué es la potencia fluctuante, imaginemos un circuito que sólo tuviera una potencia de este tipo.
Ello sólo es posible si rad (cos±90º=0), quedandoCaso que corresponde a un circuito inductivo puro o capacitivo puro.
Por lo tanto la potencia fluctuante es debida a un solenoide ó a un condensador. Tales elementos no consumen energía sino que la almacenan en forma de campo magnético y campo eléctrico.
Componentes de la intensidad Figura 1.
- Componentes activa y reactiva de la intensidad; supuesto inductivo, izquierdo y capacitivo, derechaConsideremos un circuito de C. A. en el que la corriente y la tensión tienen un desfase φ. Se define componente activa de la intensidad, Ia, a la componente de ésta que está en fase con la tensión, y componente reactiva, Ir, a la que está en cuadratura con ella (véase Figura 1).
Sus valores son:El producto de la intensidad, I, y las de sus componentes activa, Ia, y reactiva, Ir, por la tensión, V, da como resultado las potencias aparente (S), activa (P) y reactiva (Q), respectivamente:
Potencia aparente Figura 2.
- Relación entre potencias activas, aparentes y reactivasLa potencia aparente (también llamada compleja) de un circuito eléctrico de corriente alterna es la suma (vectorial) de la energía que disipa dicho circuito en cierto tiempo en forma de calor o trabajo y la energía utilizada para la formación de los campos eléctricos y magnéticos de sus componentes que fluctuara entre estos componentes y la fuente de energía.Esta potencia no es la realmente consumida "útil", salvo cuando el factor de potencia es la unidad (cos φ=1), y señala que la red de alimentación de un circuito no sólo ha de satisfacer la energía consumida por los elementos resistivos, sino que también ha de contarse con la que van a "almacenar" bobinas y condensadores. Se la designa con la letra S y se mide en voltiamperios (VA).
Su formula es:
Potencia activa
Es la potencia que representa la capacidad de un circuito para realizar un proceso de transformación de la energía eléctrica en trabajo.
Los diferentes dispositivos eléctricos existentes convierten la energía eléctrica en otras formas de energía tales como: mecánica, lumínica, térmica, química, etc.
Esta potencia es, por lo tanto, la realmente consumida por los circuitos. Cuando se habla de demanda eléctrica, es esta potencia la que se utiliza para determinar dicha demanda.
Se designa con la letra P y se mide en vatios (W). De acuerdo con su expresión, la ley de Ohm y el triángulo de impedancias:Resultado que indica que la potencia activa es debida a los elementos resistivos.
Potencia reactivaEsta potencia no tiene tampoco el carácter realmente de ser consumida y sólo aparecerá cuando existan bobinas o condensadores en los circuitos. La potencia reactiva tiene un valor medio nulo, por lo que no produce trabajo útil.
Por ello que se dice que es una potencia desvatada (no produce vatios), se mide en voltiamperios reactivos (VAR) y se designa con la letra Q.A partir de su expresión,Lo que reafirma en que esta potencia es debida únicamente a los elementos reactivos.
Potencia trifásicaLa representación matemática de la potencia activa en un sistema trifásico equilibrado está dada por la ecuación:
Energía eléctrica
Consumo de energía eléctrica por país, en millones de kWh.
Se denomina energía eléctrica a la forma de energía que resulta de la existencia de una diferencia de potencial entre dos puntos, lo que permite establecer una corriente eléctrica entre ambos —cuando se les pone en contacto por medio de un conductor eléctrico— y obtener trabajo.
La energía eléctrica puede transformarse en muchas otras formas de energía, tales como la energía luminosa o luz, la energía mecánica y la energía térmica.
Su uso es una de las bases de la tecnología utilizada por el ser humano en la actualidad.La energía eléctrica se manifiesta como corriente eléctrica, es decir, como el movimiento de cargas eléctricas negativas, o electrones, a través de un cable conductor metálico como consecuencia de la diferencia de potencial que un generador esté aplicando en sus extremos.
Cada vez que se acciona un interruptor, se cierra un circuito eléctrico y se genera el movimiento de electrones a través del cable conductor.
Las cargas que se desplazan forman parte de los átomos de— que se desea utilizar, mediante las correspondientes transformaciones; por ejemplo, cuando la energía eléctrica llega a una enceradora, se convierte en energía mecánica, calórica y en algunos casos luminosa, gracias al motor eléctrico y a las distintas piezas mecánicas del aparato.
Fuentes de energía eléctricaLa energía eléctrica apenas existe libre en la naturaleza de manera aprovechable.
El ejemplo más relevante y habitual de esta manifestación son las tormentas eléctricas. La electricidad tampoco tiene una utilidad biológica directa para el ser humano, salvo en aplicaciones muy singulares, como pudiera ser el uso de corrientes en medicina, resultando en cambio normalmente desagradable e incluso peligrosa, según las circunstancias.
Sin embargo es una de las más utilizadas, una vez aplicada a procesos y aparatos de la más diversa naturaleza, debido fundamentalmente a su limpieza y a la facilidad con la que se le genera, transporta y convierte en otras formas de energía.
Para contrarrestar todas estas virtudes hay que reseñar la dificultad que presenta su almacenamiento directo en los aparatos llamados acumuladores.
La generación de energía eléctrica se lleva a cabo mediante técnicas muy diferentes. Las que suministran las mayores cantidades y potencias de electricidad aprovechan un movimiento rotatorio para generar corriente continua en un dinamo o corriente alterna en un alternador.
El movimiento rotatorio resulta a su vez de una fuente de energía mecánica directa, como puede ser la corriente de un salto de agua o la producida por el viento, o de un ciclo termodinámico.
En este último caso se calienta un fluido, al que se hace recorrer un circuito en el que mueve un motor o una turbina.
El calor de este proceso se obtiene mediante la quema de combustibles fósiles, reacciones nucleares y otros procesos.La generación de energía eléctrica es una actividad humana básica, ya que está directamente relacionada con los requerimientos actuales del hombre.
Todas la formas de utilización de las fuentes de energía, tanto las habituales como las denominadas alternativas o no convencionales, agreden en mayor o menor medida el ambiente, siendo de todos modos la energía eléctrica una de las que causan menor impacto.La energía eléctrica se crea por el movimiento de los electrones, para que este movimiento sea continuo, tenemos que suministrar electrones por el extremo positivo para dejar que se escapen o salgan por el negativo; para poder conseguir esto, necesitamos mantener un campo eléctrico en el interior del conductor (metal, etc.).
Estos aparatos construidos con el fin de crear electricidad se llaman generadores eléctricos. Claro que hay diferentes formas de crearla, eólicamente, hidráulicamente, de forma geotérmica y muchas más.
Suscribirse a:
Entradas (Atom)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}